Skip to content
About Us
Team
Current Projects
Publications
Contact
Main Menu
About Us
Contact
Current Projects
Menu Toggle
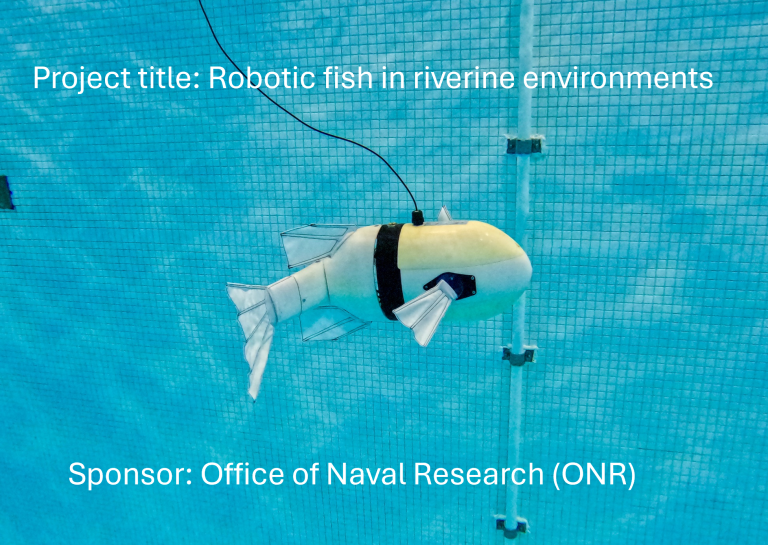
Bio-robotic fish
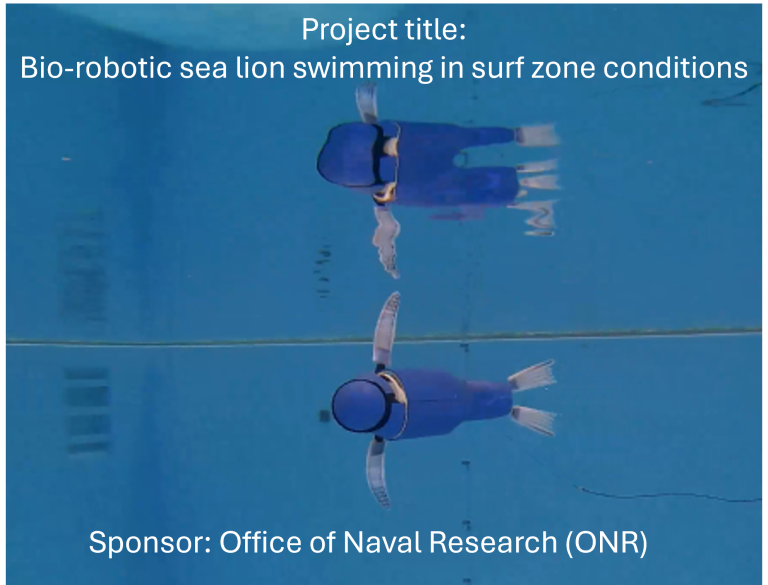
Bio-robotic sea lion
Home
Publications
Team
Current Projects